
Untuk ngejalanin sistem FS, ECU butuh acuan posisi sudut rotasi kruk as yang lebih presisi daripada ketika pakai sistem FO. Sudut acuan ini disebut sebagai trigger angle alias sudut picu. Kenapa harus presisi? Karena acuan ini bakal dipakai untuk nentuin timing pengapiannya. Sebagai contoh, kita tentuin acuannya ada di 60 derajat sebelum TMA. Misalnya kita mau timing pengapiannya ketika 6000 RPM ada di 40 derajat sebelum TMA, maka ECU akan menambahkan waktu tunda senilai 20 derajat (yaitu dari 60-40) sebelum memerintahkan koil untuk memantik busi.
Nih gw kasih hitung2an-nya..
- Saat 6000 RPM, berarti kruk as berputar sebanyak 6000 kali tiap menitnya.
- Dengan demikian satu kali putaran butuh waktu selama 60 detik dibagi 6000 putaran yaitu 0.01 detik atau 10 milidetik (ms).
- Satu kali putaran kruk as bernilai 360 derajat, berarti satu derajat putaran saat 6000 RPM ditempuh dalam waktu 10 ms dibagi 360 derajat yaitu 0.027 ms.
- Untuk contoh di atas, waktu tunda senilai 20 derajat berarti 20 x 0.027 = 0.54 ms.
Jadi, setelah mendapatkan sinyal trigger angle di 60 derajat sebelum TMA, ECU akan menunggu selama 0.54 ms dan setelah itu memerintahkan koil untuk memantik busi. Hasilnya adalah timing pengapian yang jatuh di 40 derajat sebelum TMA.
Bisa kebayang kan kalo misalnya acuannya tidak stabil alias berubah-ubah? Misalnya sekarang 60 derajat.. nanti berubah ke 55 derajat.. nanti lagi berubah ke 65 derajat. Dampaknya juga nanti timing pengapiannya tidak akan stabil. Selisih 5 derajat itu besar lho.. Selisih itu bisa membedakan antara dapat torsi maksimum atau piston bolong.
Jadi, untuk konversi ke FS, syarat utamanya adalah punya sudut acuan yang stabil. Gimana caranya? Lanjut ya..
Ketika gw pake sistem FO, ECUnya mengambil sinyal acuan dari pulser. Setelah gw pelajari, tonjolan magnet Tiger lebarnya adalah 22 derajat. Kalau gw bisa pakai salah satu ujung tonjolannya sebagai titik acuan, misalnya ujung yang paling depan yaitu 32 derajat sebelum TMA, sebenarnya tidak ada masalah karena posisi tonjolan ini tidak akan berubah dan selalu stabil. MASALAHNYA.. pulser pada dasarnya adalah VR (variable reluctance) sensor yang sinyal outputnya berupa gelombang sinus yang tidak bisa langsung diumpanin ke ECU karena gelombangnya akan melebar seiring bertambahnya RPM. Gelombang yang melebar = sudut acuan yang berubah-ubah = jelek..

Untuk mengatasi gelombang sinus yang berubah amplitudonya, perlu sebuah rangkaian adaptor yang mengubah gelombang sinus pulser menjadi sinyal digital sebelum diumpankan ke ECU. Rangkaian adaptor tersebut disebut zero-crossing detector. Sesuai namanya, rangkaian ini mendeteksi perubahan polaritas gelombang sinus dari positif menjadi negatif (atau sebaliknya) dan memanfaatkan perubahan polaritas itu sebagai trigger untuk mengeluarkan sinyal digital.

Gambar di atas adalah prinsip kerja zero-crossing detector. Yang di atas adalah sinyal input dan bawah adalah sinyal output. Bisa dilihat ketika polaritas sinus berubah dari positif ke negatif, outputnya HI dan ketika berubah dari negatif ke positif, outputnya LO. Dengan rangkaian ini, perubahan gelombang sinus selebar apapun tidak akan jadi masalah selama masih ada titik perseberangan atau perubahan dari positif ke negatif. Untuk zero-crossing detector, gw pakai IC LM1815 dan rangkaiannya seperti ini.

Jadi udah selesai masalahnya? Belumm.. sabar dulu coy. Coba bayangin gimana kalo titik perubahan polaritasnya tidak pasti. Ga usah jauh-jauh, liat gambar pertama di atas. Bisa lo tentuin kapan titik berubahnya dari positif ke negatif? Susah ya? Masalahnya adalah durasi nol voltnya cukup panjang. Dari gelombang positif, turun ke nol volt dan ada jeda dulu sebelum nongol gelombang negatif. Apa akibatnya? Kalau ada noise sedikit di saat durasi nol volt, akan menyebabkan trigger liar yang disebut jitter. Ini juga akan menyebabkan posisi HI muncul secara acak dan tidak stabil. Berikut ilustrasinya..

Apa yang menyebabkan jitter? Bisa dilihat di atas penyebabnya adalah permukaan tonjolan yang terlalu lebar. Seperti diketahui, gelombang positif muncul ketika perubahan dari permukaan rendah ke tinggi (tonjolan pulser depan) dan gelombang negatif muncul ketika perubahan dari permukaan tinggi ke rendah (tonjolan pulser belakang). Kalau tonjolan pulsernya terlalu lebar (seperti standarnya Tiger yang 22mm panjangnya), jarak gelombang positif dan negatifnya juga akan terlalu jauh sehingga titik pergantian dari positif ke negatif juga tidak jelas. Obatnya pun sudah jelas: pangkas tonjolan pulser. Dengan lebar tonjolan yang sesuai alias tidak terlalu lebar, maka posisi gelombang positif dan negatif akan berhimpit dan titik perubahan dari positif ke negatif akan jelas. Hasilnya jadi ilustrasi di bawah.

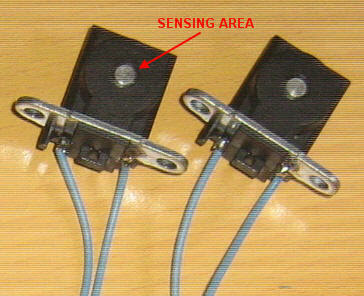
Lantas muncul deh pertanyaan: bagian mana yang harus dipangkas? Berapa banyak? Supaya presisi, lebar tonjolannya diusahakan tidak jauh dari diameter "mata" atau "pentilan" pulser, bahasa kerennya sih sensing area. Kalau diperhatikan, di pulser ada tonjolan besi bulat kan? Nah itu yang namanya sensing area. Diameternya biasanya cukup kecil, berkisar 3-5mm.
Supaya presisi, lebar tonjolan pulser juga tidak boleh jauh lebih besar daripada diameter mata pulser. Persis seperti contoh ilustrasi di atas kan? Untuk jelasnya, ini ada bacaan dari manual Megasquirt tentang VR sensor.
Bagian mana yang dipotong? Bagian depan (yang posisinya 32 derajat sebelum TMA) atau bagian belakang (yang posisinya 10 derajat sebelum TMA)? Coba bayangin kalo yang dipangkas bagian belakang sehingga yang tersisa tonjolan depan sepanjang 5mm. Berhubung kebetulan pada magnet Tiger satu mm nilainya mendekati satu derajat, berarti sisa tonjolan pulsernya adalah 5 derajat yaitu dari 27 sampai 32 derajat sebelum TMA. Titik perubahan polaritas sinusnya akan jatuh kira-kira di tengah tonjolan yaitu pada 27 + (5/2) = 29.5 derajat. Untuk mudahnya kita bulatkan ke 30 derajat dan angka ini yang menjadi trigger angle di ECU. ECU sebagai otak sistem injeksi tentu butuh waktu untuk "berpikir" dan "berhitung" kan? Kita anggap saja berpikirnya butuh waktu selama beberapa milisekon dan selama jangka waktu tersebut kruk as sudah berputar sebanyak 5 derajat, maka ECU baru bisa memerintahkan koil untuk memercik busi pada posisi 25 derajat sebelum TMA (dari 30 dikurangi 5). Keliatan kan masalahnya? Timing pengapian Tiger aja bisa sampai 32 derajat sebelum TMA. Kalau terbatas pada maksimal 25 derajat, larinya akan lemot dan boros bensin. Jadi berapa nilai ideal untuk trigger angle? Manual ECU Megasquirt menyebutkan kita harus menghindari trigger angle di bawah 50 derajat, jadi untuk gampangnya biasanya trigger angle diusahakan ada di 60 derajat sebelum TMA. Dengan demikian akan ada cukup waktu untuk ECU berpikir sebelum memercikkan busi.
Jadi gw harus mindahin posisi tonjolannya ke 60 derajat sebelum TMA? Betul tapi itu kalau mau maksain pakai mode "This Cylinder". Apaan tuh mode? Gw lanjut dulu ya, nanti jelas kok.. Kalo ga mau repot ada solusi lain, yaitu kita justru menyisakan tonjolan belakang sepanjang 5mm, yaitu dari 10 sampai 15 derajat sehingga trigger angle-nya menjadi sekitar 12 derajat. Waduh timing advancenya jadi makin kecil dong? Nah ini dia kuncinya.. kalau trigger angle kita set di bawah 20 derajat (seperti contoh tadi yaitu 12 derajat), Megasquirt akan berubah pakai mode "Next Cylinder". Apa lagi nih? Dalam mode ini, Megasquirt akan menghitung delay untuk timing advance siklus 4-tak berikutnya. Jadi daripada menghitung delay untuk timing siklus saat ini, yang dihitung adalah delay untuk timing siklus berikutnya. Ilustrasinya di bawah ini dan ini link manualnya.

Udah bosen belum? Lanjut ya.. Kelebihannya kalau pakai Next Cylinder mode, kita tidak perlu memindahkan tonjolan magnetnya, cukup dengan pakai tonjolan yang ada dan dipangkas. Kekurangannya? Cara ini tidak sepresisi This Cylinder mode karena selama perhitungan delay yang cukup panjang, kecepatan putaran kruk as belum tentu konstan. Bisa saja makin cepat atau makin lambat. Nanti beresiko posisi timing advancenya bisa sedikit meleset kalau putaran kruk asnya terlalu berbeda dari kondisi sebelumnya.. Cuma berhubung mode ini simpel, gw putuskan untuk pakai cara ini. Akhirnya dengan bermodalkan magnet cadangan yang gw beli dari kaskus, gw pangkas tonjolan pulsernya sampai jadi kayak begini..


Kemudian gw beli koil Honda CB100, kondensor Toyota Kijang dan pake igniter mesin 4A-GE dari Charmant gw dan gw sambung ke output ignition ECU-nya. Lho kok pake igniter? Jadi sistem TCI dong? Hehe iya.. dulu emang gw sempet berencana pakai CDI Tiger yang dimodifikasi dengan maksud supaya bisa diperintah langsung oleh ECU.. tapi entah kenapa kok hidup.. Mungkin ada teori yang kelewat ama gw atau gw rasa ada kaitannya dengan masalah dwell tapi nanti ajalah gw pikirin. Akhirnya terpaksa pakai sistem TCI dengan resiko naiknya konsumsi daya. Mudah2an sistem pengisian akinya ga tekor deh. Mungkin ada pertanyaan, kok pake koil Honda CB100 yang sistem platina? Sebenarnya TCI itu prinsipnya sama dengan sistem platina. Bedanya, pada sistem TCI, platinanya digantikan oleh rangkaian transistor. Jadi pada dasarnya koil sistem platina bisa dipakai pada sistem TCI..



Berikut ini diagram sistem injeksi gw yang terakhir..

Setelah itu, settingan Megasquirtnya sedikit diubah supaya jadi full standalone dan selesai!
Gimana hasilnya? Sebenarnya udah bisa jalan pakai cara begini tapi.. masih agak susah distarter dan gasnya harus ditahan di atas 2000 RPM. Kalau gasnya dilepas dan dibiarin idle, mesinnya bakal nembak-nembak sebelum akhirnya mati. Kalo dipakai jalan dan digeber sih oke banget.. Makanya judul postingan ini adalah (Dikit Lagi) Full Standalone karena masih belum sempurna.. Kenapa bisa begitu? Ini gw masih dalam tahap trial and error jadi belum berani gw publish.. tapi nanti kalo gw udah nemu solusinya supaya sempurna, pasti bakal gw sharing..
awesome
BalasHapushebat om. terus berkarya dan share ilmu anda..
BalasHapuskeren postingannya....
BalasHapusklo boleh berpendapat knp dibawah 2000rpm masih nembak2. itu mungkin karena pake 1 tooth ajah, jadi controller perhitungannya kurang akurat di low rpm.
coba pake metode missing tooth
Tahun 2022 dan baru gw bales. Wkwkwk. Mungkin betul begitu om.. Tapi masih ada ide satu lagi yg belum gw coba. Sistem di atas yg nembak2 masih pakai pakai mode Next Cylinder (trigger pulser saat ini dipakai untuk perhitungan spark siklus berikutnya, jadi harus nunggu satu putaran full sebelum busi nembak). Gw kepikiran untuk geser celah spi magnet supaya tonjolan magnetnya lebih maju ke sekitar 60-90 derajat, jadi bisa pakai mode This Cylinder (trigger pulser saat ini dipakai untuk perhitungan siklus yg sama, ga perlu nunggu satu putaran kruk as sebelum busi nembak). Harapannya dengan selisih waktu yang jauh lebih kecil, pergeseran waktunya lebih kecil dan ga nembak-nembak).
Hapus